
同等学力申硕机械工程学科综合重点难点汇总
同等学力申硕《机械工程学科综合水平全国统一考试》考点手册
遵循《同等学力申硕机械工程学科综合水平全国统一考试大纲及指南(第二版)》的内容和要求编排,分为机械工程控制基础、机械动力学基础、现代设计方法、CAM和先进制造技术、机电一体化技术、机车车辆动力学和汽车动力学七大部分,并根据历年真题、考试样卷等对每章的重难点进行了归纳总结,提纲挈领,方便考生快速理解并掌握核心考点。
立即阅读 >>
同等学力申硕《机械工程学科综合水平考试》知识点归纳
第一章 机械工程控制基础
第一节 绪论
考点一 机械工程控制论的研究对象 ★★
(1)机械工程控制论是研究以机械工程技术为对象的控制论问题,研究系统及其输入、输出三者之间的动态关系。
(2)机械工程控制论主要解决的问题:①系统的最优控制:研究系统的动态特性、内部信息传递的规律及系统受到外加作用后的反应,进而决定采用实现对系统的最优控制的策略。②系统分析:应用控制论的观点和思想方法揭示出机械工程问题的本质,找到有效的解决方法。
考点二 机械工程系统中的信息传递、反馈以及反馈控制 ★★
(1)信息及信息传递:信息是指一切能表达一定含义的信号、密码、情报和消息。信息传递是指信息在系统及过程中以某种关系动态地传递的过程。
(2)系统及控制系统:系统指能完成一定任务的一些部件的组合。控制系统是指系统的可变输出能按照要求由参考输入或控制输入进行调节的系统。
(3)反馈及反馈控制:信息的反馈指把一个系统的输出信号不断直接地或经过中间变换后全部或部分地返回到输入端,再输入到系统中去。负反馈:指反馈回去的信号与原系统的输入信号的方向相反;正反馈:指反馈回去的信号与原系统的输入信号的方向相同。
(4)对控制系统的基本要求:稳定性、快速性和准确性。
第二节 拉普拉斯变换的数学方法
考点一 复数和复变函数的概念 ★★
(1)复数s=σ+jω,σ:实部;ω:虚部。
(2)复数的表示方法:①点表示法:一个复数对应于复平面上的一个点。②向量表示法:从原点指向点(σ,ω)的向量。③三角表示法和指数表示法:s=r(cosθ+jsinθ)或s=rejθ。
(3)复变函数:以复数s=σ+jω为自变量,按某一确定关系构成的函数G(s)。零点:G(zi)=0;极点:G(pi)→∞。
考点二 拉氏变换和拉氏反变换的定义 ★★★★
(1)拉氏变换:
(2)拉氏反变换:
考点三 典型时间函数的拉氏变换(见表1-2-1) ★★★★★
表1-2-1 典型时间函数的拉氏变换

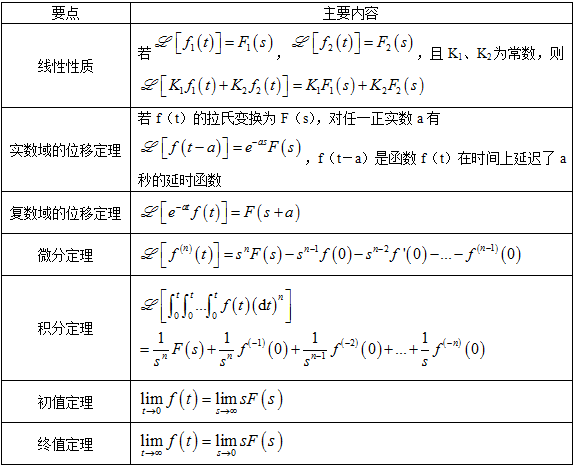
考点四 拉氏变换的重要性质(见表1-2-2) ★★★★
表1-2-2 拉氏变换的重要性质
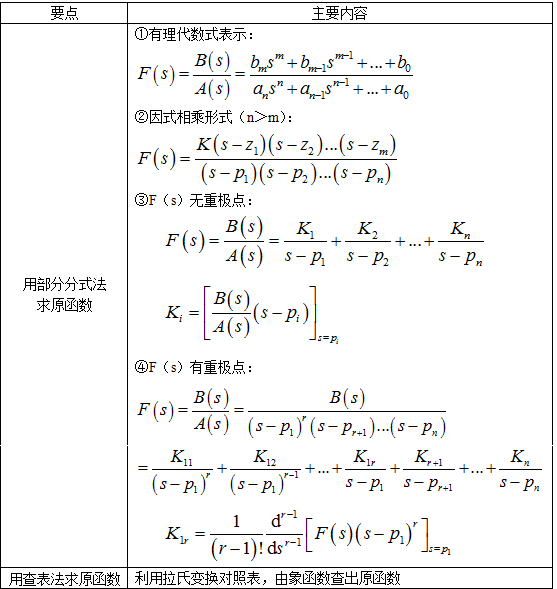
考点五 拉氏反变换的数学方法(见表1-2-3) ★★★★
表1-2-3 拉氏反变换的数学方法
考点六 用拉氏变换解常微分方程 ★★★
对微分方程逐项取拉氏变换,解s为自变量的代数方程,通过拉氏反变换求s出时域解。
| 内容来源 | 同等学力申硕考试《机械工程学科综合》考点手册 |
扫码阅读 |
第三节 机械工程系统的数学模型
考点一 概述 ★★★
(1)系统数学模型的概念
数学模型表达系统动态特性,是分析、研究一个动态系统特性的前提。建立系统数学模型的方法:①分析法:依据系统本身所遵循的有关定律列写数学表达式。②实验法:根据系统对某些典型输入信号的响应或其他实验数据建立数学模型。
(2)线性系统:系统的数学模型表达式是线性的,可以运用叠加原理。非线性系统:系统需要用非线性方程描述,不能运用叠加原理。
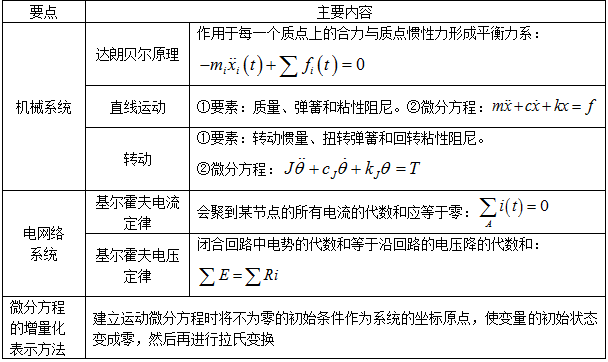
考点二 系统微分方程的建立(见表1-3-1) ★★★
表1-3-1 系统微分方程的建立
考点三 传递函数(见表1-3-2) ★★★
表1-3-2 传递函数

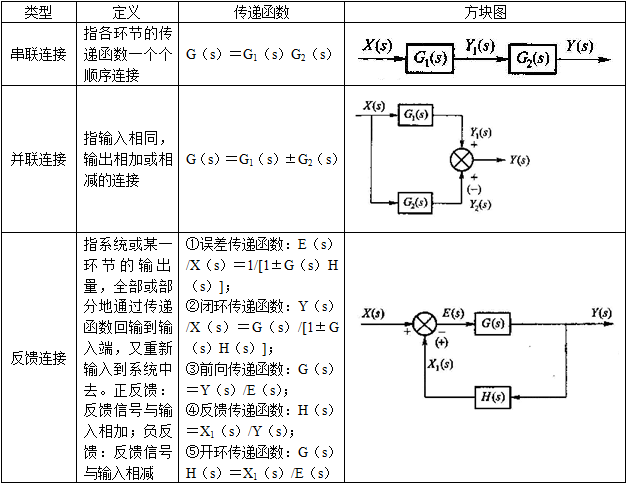
考点四 方块图及动态系统的构成(见表1-3-3) ★★★★
表1-3-3 方块图及动态系统的构成
考点五 方块图的简化规则 ★★★
(1)前向通道的传递函数保持不变;
(2)各反馈回路的传递函数保持不变。各种方块图的等效变换规则见教材表1-1。
考点六 画系统方块图及求传递函数的步骤 ★★
(1)确定系统的输入和输出。
(2)列出微分方程。
(3)对初始条件为零的各微分方程进行拉氏变换。
(4)用方块图表示各拉氏变换式,连成系统求传递函数。
完整版链接:/Ebook/968062.html
【目录】达聪学习网“同等学力申硕《机械工程学科综合水平全国统一考试》考点总结”
| 第一章 机械工程控制基础
第一节 绪论 第二节 拉普拉斯变换的数学方法 第三节 机械工程系统的数学模型 第四节 控制系统的时域分析 第五节 系统的频率特性 第六节 系统的稳定性 第七节 机械工程控制系统的校正和设计 第八节 离散控制系统 第二章 机械动力学基础 第一节 绪论 第二节 机械振动基础 第三节 机构动力学基础—平面机构的平衡 第三章 现代设计方法 第一节 机电产品设计过程中的方法论 第二节 最优化设计 第三节 有限元分析 第四章 CAM和先进制造技术 第一节 21世纪制造业的特点 第二节 CAD/CAM技术 第三节 几何建模和计算机辅助造型 第四节 工程数据库 第五节 数控编程 第六节 计算机辅助工艺过程设计 第七节 并行工程(CE) |
第八节 虚拟制造系统(VMS)
第九节 网络化制造 第十节 面向环境的设计制造 第五章 机电一体化技术 第一节 概论 第二节 控制电机 第三节 传感器及机械量检测 第四节 电液控制机构 第五节 计算机数控装置 第六章 机车车辆动力学 第一节 总论 第二节 轮轨滚动接触理论 第三节 车辆的蛇行运动稳定性 第四节 车辆的随机振动 第五节 车辆的曲线通过 第六节 列车运行时的纵向作用力 第七节 铁道车辆动力学的数值方法 第八节 车辆动力学的控制 第七章 汽车动力学 第一节 绪论 第二节 直线行驶汽车的驱动力和行驶阻力 第三节 汽车转向 第四节 汽车前轴和转向轮系的振动 第五节 汽车承载系统振动 第六节 汽车制动系统动力学 |
- 页数:98
- 推荐指数:★★★★★
- 适用:网页/电脑/平板/手机


共有 0 条评论